组装教程
准备工作
在开始组装之前,请确保�您已经:
- 准备好所有必要的零部件(参考零部件清单)
- 准备好所需的工具(斜口钳、M2 螺丝刀)
- 有一个干净的工作台
组装步骤
1. 材料准备
- 检查所有 3D 打印件是否完整
- 清理打印件上的支撑材料
- 确保所有孔位通畅

图1:所有材料准备
2. 电子元件安装
- 安装舵机(两侧的双排三针->外侧接棕色的舵机线(负极)上腿下足的连接方式)
- 连接喇叭
- 连接电池
- 烧录程序
- 打开开关(使舵机初始化到初始位置->90 度安装过程确保舵机齿轮不发生变化,手臂初始为向下 45 度)
- 舵机线拆下,等待身体安装完成重新插上

图2:电子元件安装
3. 腿部组装
使用舵机包内的两个大螺丝固定舵机

图3:组装腿部舵机
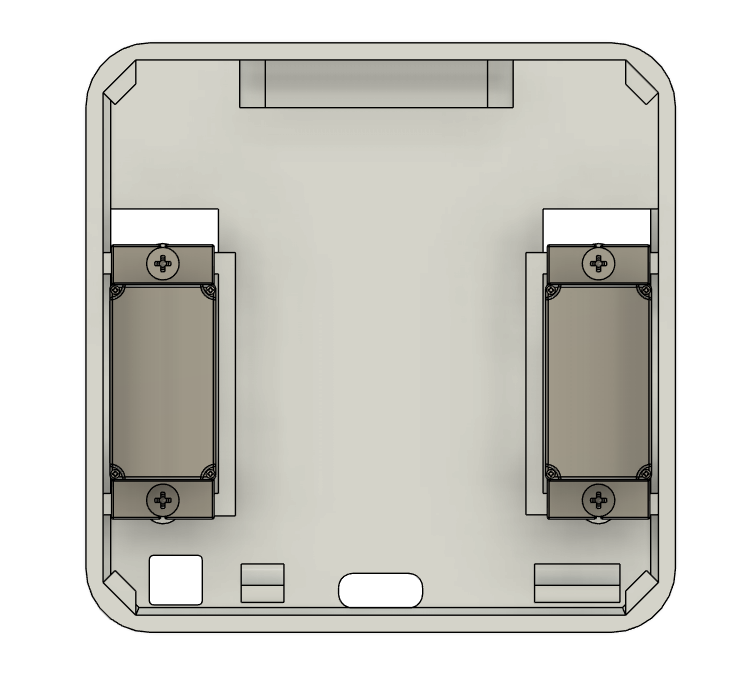
图4:完成组装腿部舵机
修剪舵机十字摇臂:较长的两端剪掉大约一半即可
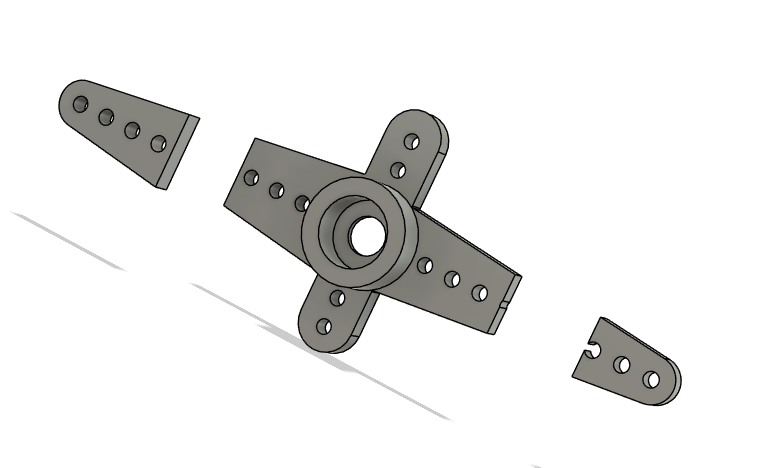
图5:修剪舵机十字摇臂
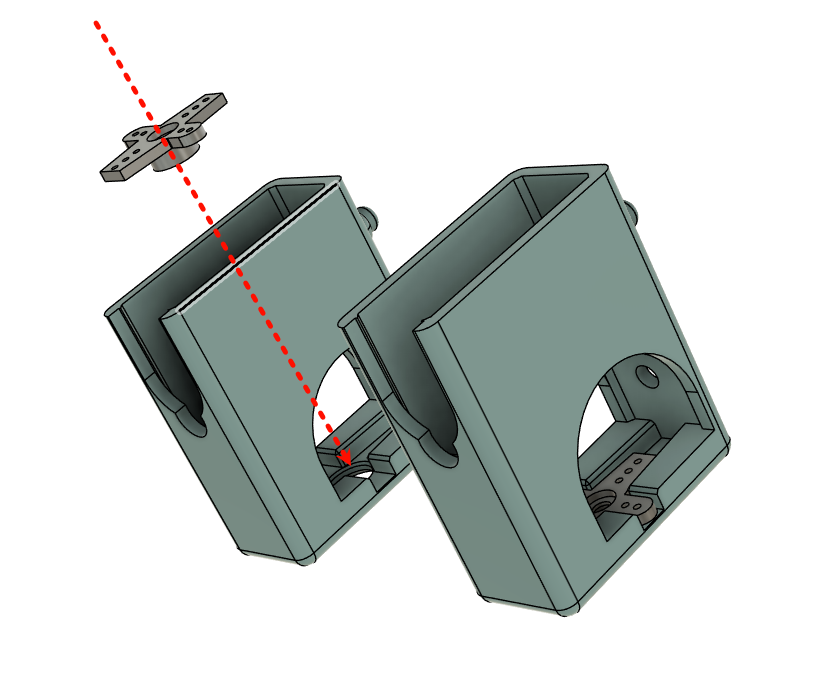
图6:安装十字摇臂到腿部
保持腿部圆柱突起朝向屏幕一侧,腿部方向垂直朝前(尽量不要内八、外八,有些可能会有一点点角度不影响)
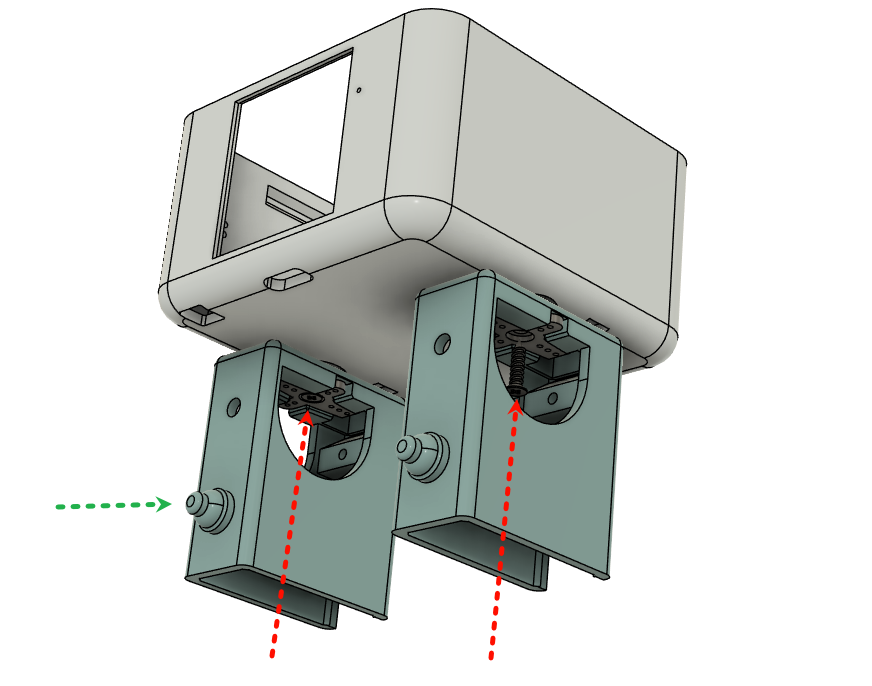
图7:固定腿部并拧紧固定螺丝
4. 脚部组装
使用下面形状的摇臂,垂直朝上安装,并拧紧螺丝
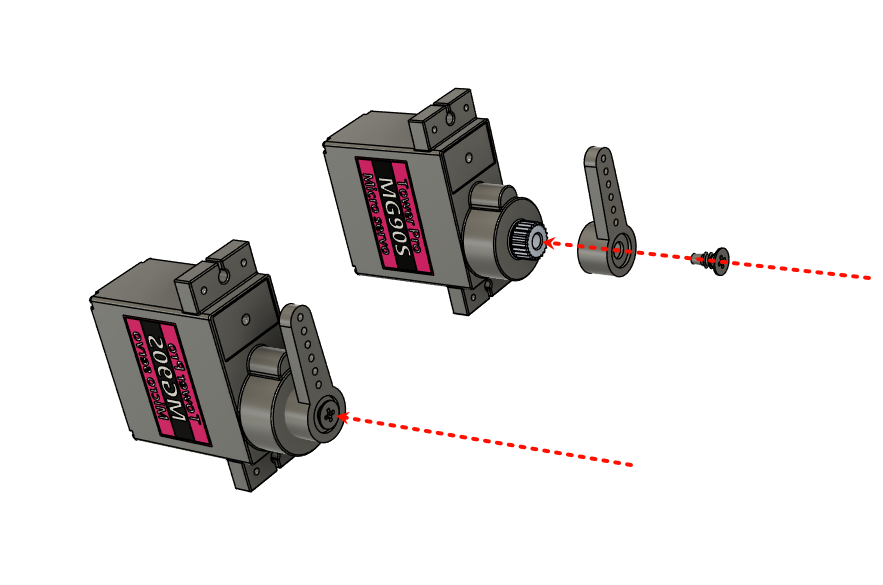
图8:固定脚部舵机摇臂
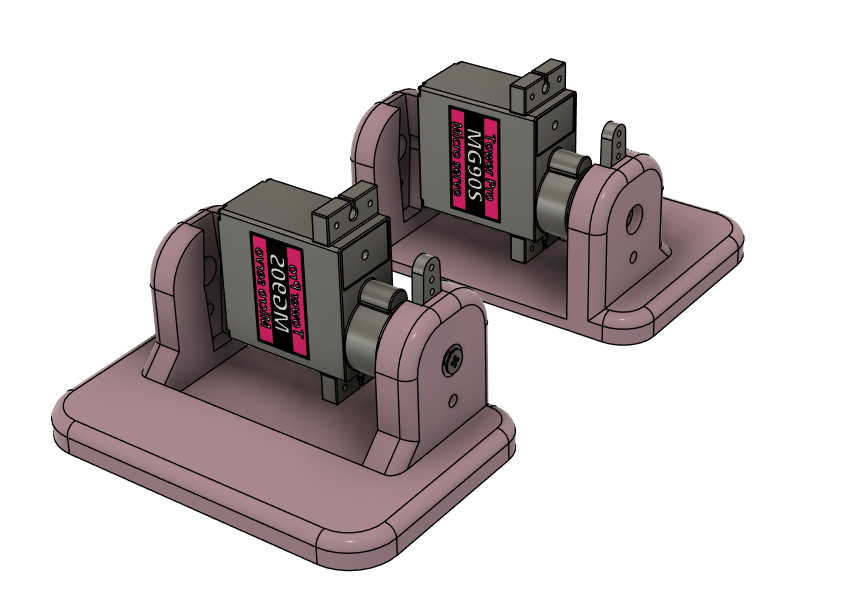
图9:固定脚部
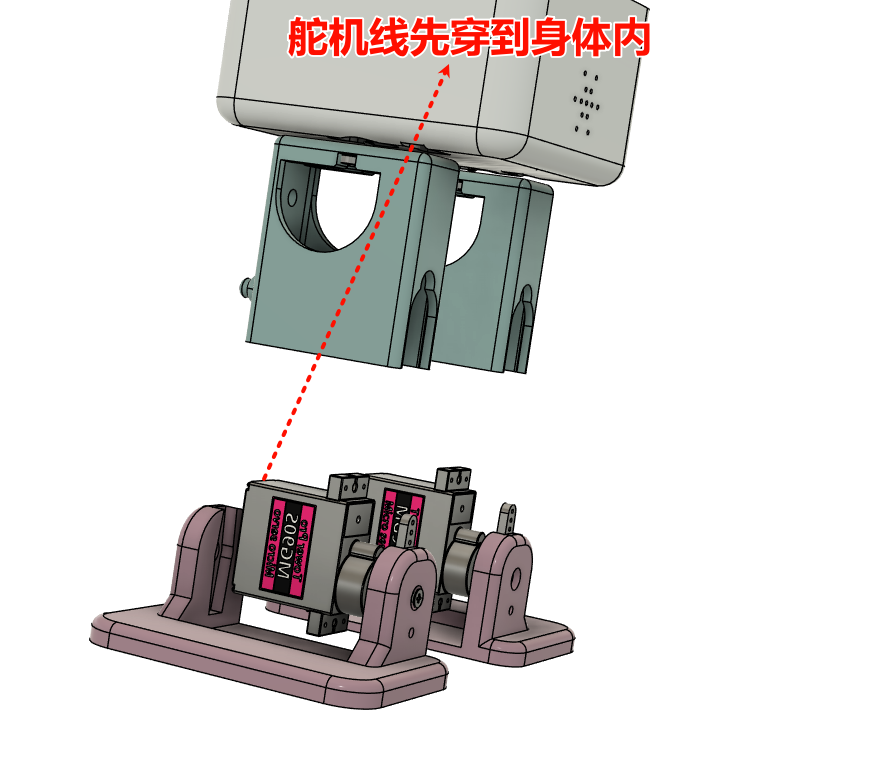
图10:脚部舵机线穿到身体
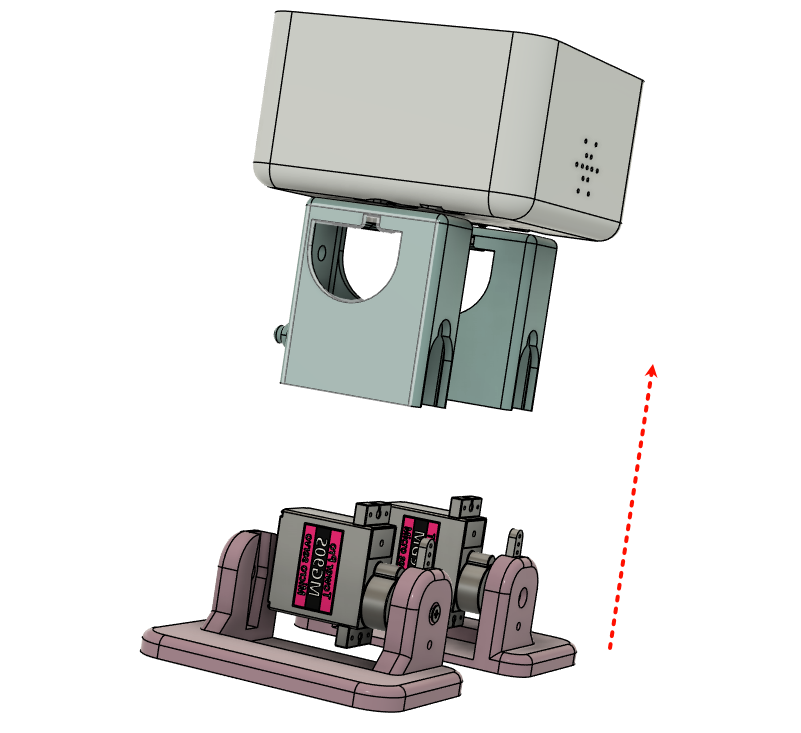
图11:脚部安装
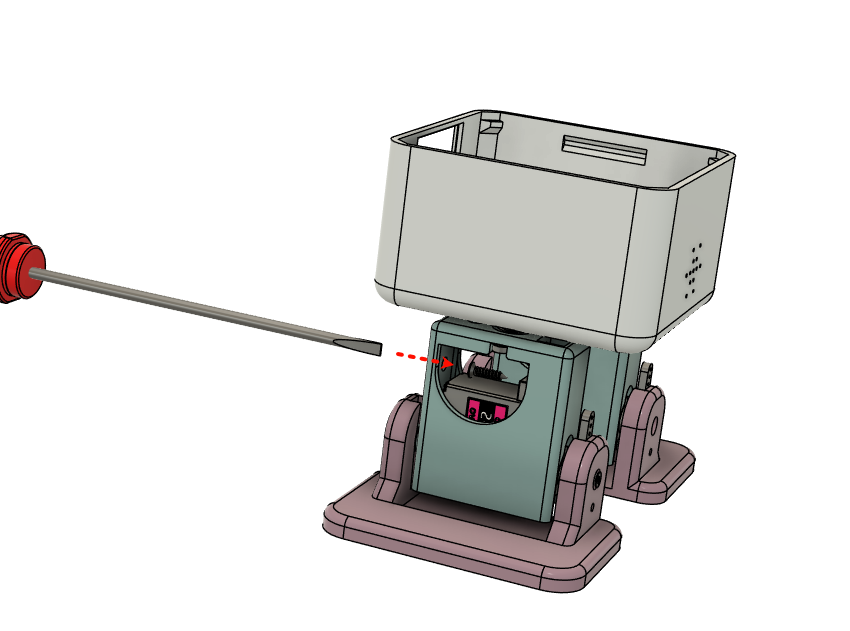
图12:脚部舵机固定螺丝安装
5. 电�路板安装
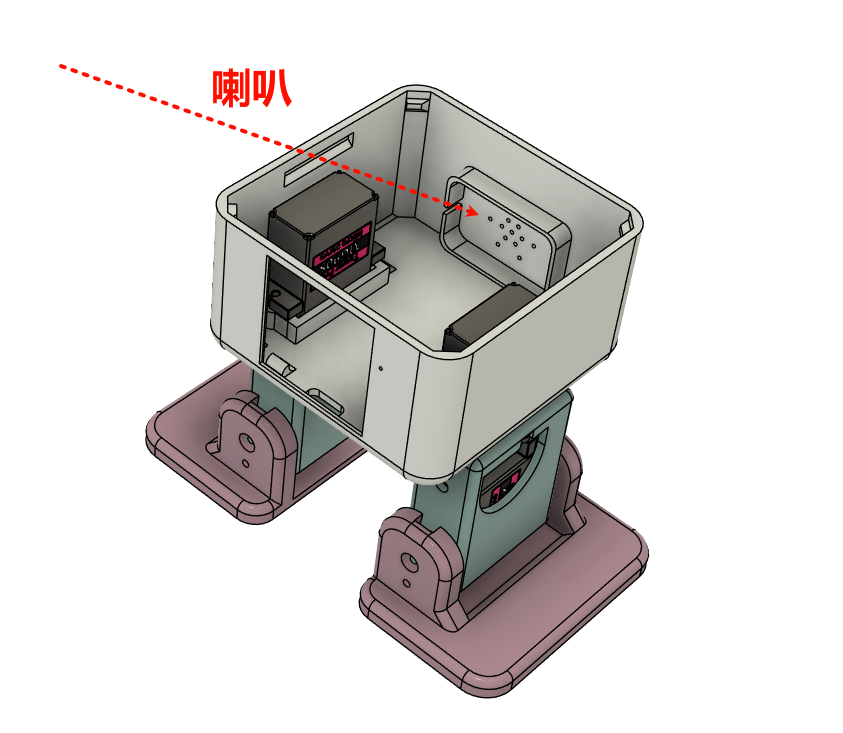
图13:固定喇叭,有个线的开槽
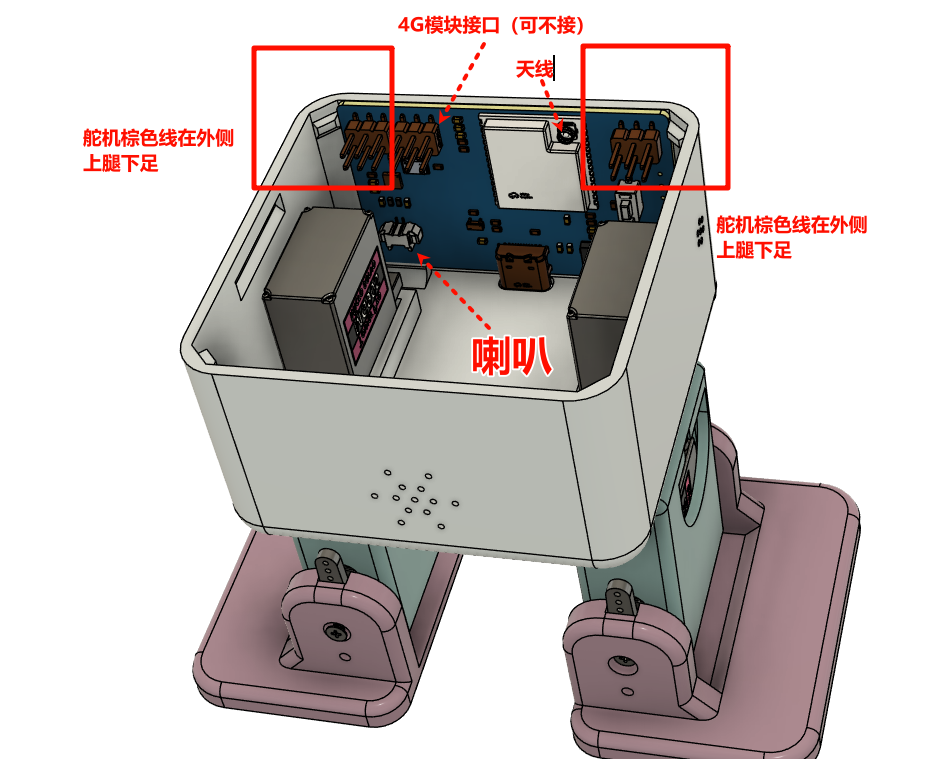
图14:安装好舵机线、喇叭、电池、天线
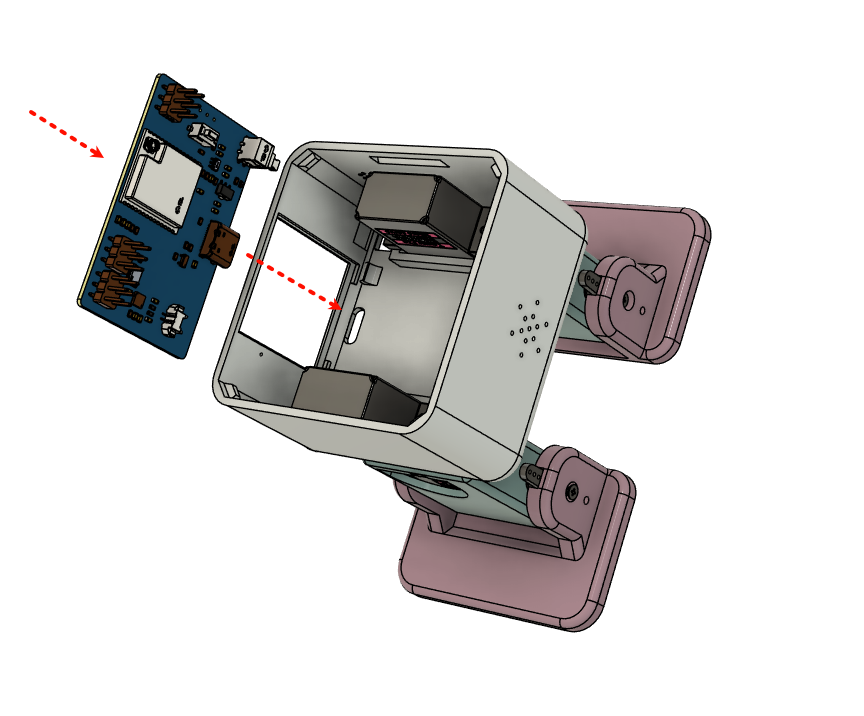
图15:安装主板
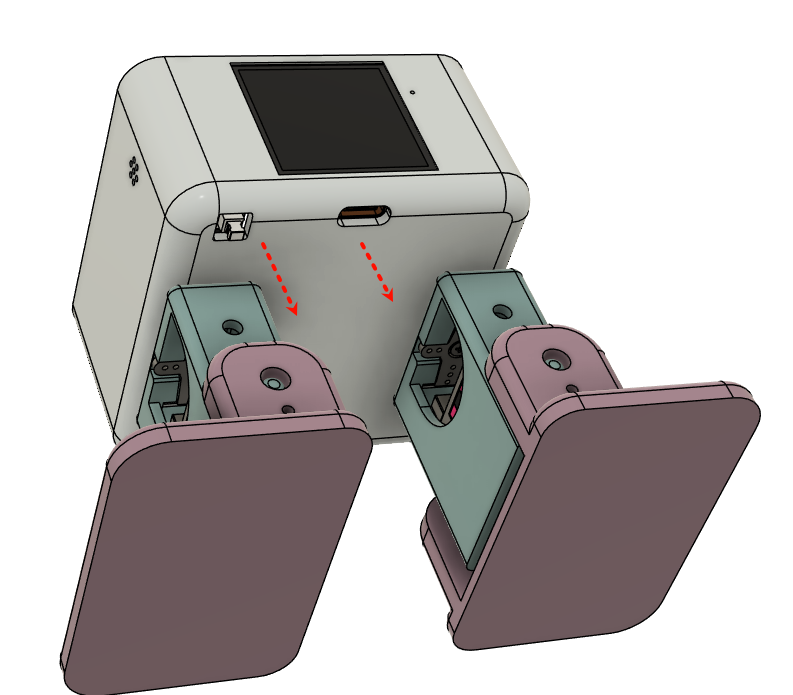
图16:确保屏幕、typec充电口和开关安装到位
6. 脑袋上盖安装
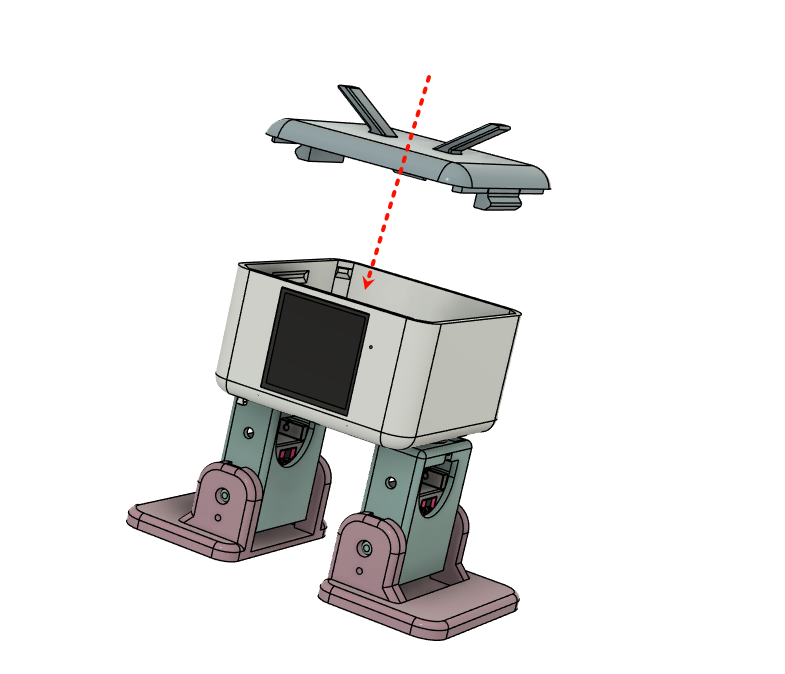
图17:脑袋上盖前侧有个突起,压紧电路板
注意事项
- 组装过程中请小心操作,避免损坏零部件
- 确保所有螺丝拧紧但不要过度用力
- 注意舵机的安装方向
常见问题
-
舵机不转动
- 重新启动
- 检查接线是否正确
- 确认电源供应正常
- 验证程序是否正确烧录
-
结构不稳定
- 检查螺丝是否拧紧
- 确认 3D 打印件是否变形
下一步
完成组装后,请参考使用说明页面了解如何开始使用您的机器人。
如果遇到任何问题,请查看我们的常见问题解答或联系技术支持。